11:42 Самый маленький четвероногий робот | |
Тот факт, что большинство насекомых (за исключением действительно причудливых) очень малы, не мешает им находиться повсюду, где они хотят быть, особенно в тех местах, из которых вы пытаетесь их выгнать. Робототехники уже экспериментируют с роботами, имеющими вид жуков, но они все еще довольно большие, размером с гигантских жуков или бабочек. На прошедшей в прошлом месяце конференции ICRA 2016 Райан Сен-Пьер и профессор Сара Бергбрайтер из Университета штата Мэриленд представили доклад об особенностях походки робота весом менее 2 граммов, приводимого в действие магнитами. И это только начало, роботы будут становиться все меньше. Сегодня есть ряд крошечных роботов, но они в основном создавались не для экспериментального тестирования в динамике. Чтобы выяснить, какая походка лучше всего подходит для очень маленьких шагающих роботов, Райан Сен-Пьер первоначально планировал использовать шестиногого робота RHex и просто уменьшить его размеры.
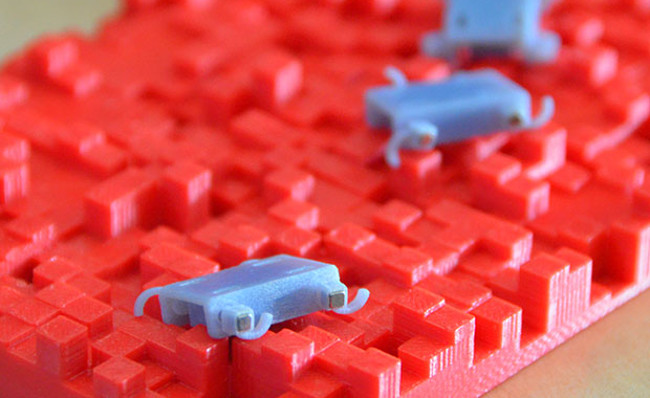
Преимуществом конструкции RHex является то, что каждая ножка управляется самостоятельно, что позволяет легко экспериментировать с разными типами передвижения. Но, как выяснилось, крошечные RHex не работают должным образом, потому что ноги, как правило, цепляются друг с другом. Так что Райан убрал среднюю пару, сделав робота четырехногим. Вся конструкция изготавливается с помощью 3D-печати. Остается добавить двигатели, и робот может ходить. Каждый четвероногий робот имеет длину 20 мм, высоту 5,6 мм и вес около 1,6 грамма. Традиционные двигатели и батареи здесь не используются. Вместо этого робот с магнитным приводом двигается с помощью сгенерированных магнитных полей. Каждый робот имеет четыре ступни с встроенным в них 2-мм неодимовым магнитом кубической формы. Когда вы вращаете большой магнит в непосредственной близости от робота, магнитное поле вызывает вращение этих маленьких магнитов, а также вращение ступней робота. Изменяя дипольную ориентацию магнитов в ступнях в различных комбинациях, вы можете заставить робота двигаться различным стилем, в том числе рысью, переваливаясь, перекатами и скачками: На ровной площадке прыгающая поступь достигается при вращении магнита с частотой 10 Гц и приводит к максимальной скорости около 78 мм/с, что почти в четыре превышает длину робота. Прыгающий способ перемещения также оказался лучшим для слегка пересеченной поверхности. Хотя, при более высоких перепадах другие способы перемещения оказались более подходящими. «Мы выяснили, что более динамичные способы передвижения, где есть большее раскачивание корпуса, являются более эффективными для пересеченной местности, но медленнее на ровной местности, - сказал Райан, - Самыми удивительными оказались фазы полета в некоторых случаях, таких как прыжки. За счет этого данный способ передвижения оказался эффективнее других на более ровной местности». Прелесть этой конструкции в том, что в ней легко соединяются различные типы передвижения, разные виды ступней или даже различные структуры самого робота (например, эластичные структуры). Нижний предел размера робота ограничен только материалами, необходимыми для печати, а именно теми, в которых могут быть сделаны небольшие магниты. Это означает, что роботы могут реально стать очень крошечными. | |
|
| |