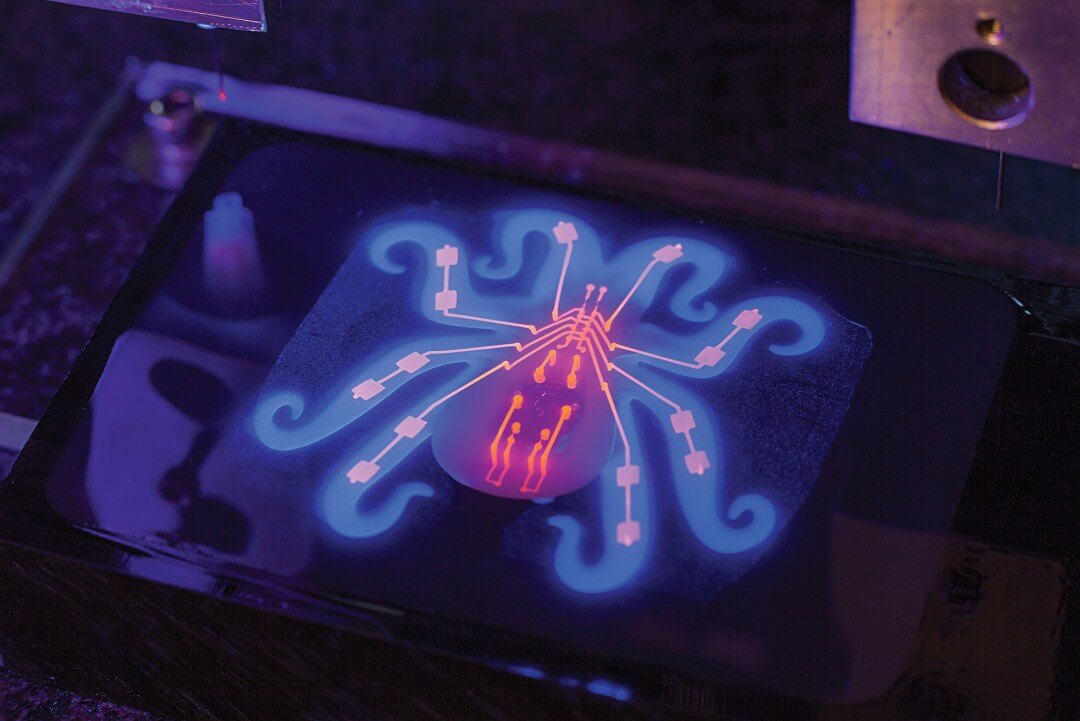
Октобот размером с ладонь работает на концентрированной перекиси водорода, закаченной в небольшую ёмкость, откуда под давлением топливо проходит по конечностям к платиновым контактам и в результате определённых реакций выделяет газ. Он распространяется по внутренним полостям бота, проходя сквозь микрофлюидный контроллер, управляющий движением щупалец. Робот начинает шевелиться. Его движения очень похожи на поведение настоящего осьминога, посмотрите сами!
Строго говоря, этот прототип — это даже не совсем робот, а очень милая шевелящаяся пневматическая система. Прототип получился не сразу, но теперь, кажется, идеальный рецепт найден. Сначала нужно положить в форму микрофлюидный чип, залить туда силикон, а потом, к
...
Читать дальше »